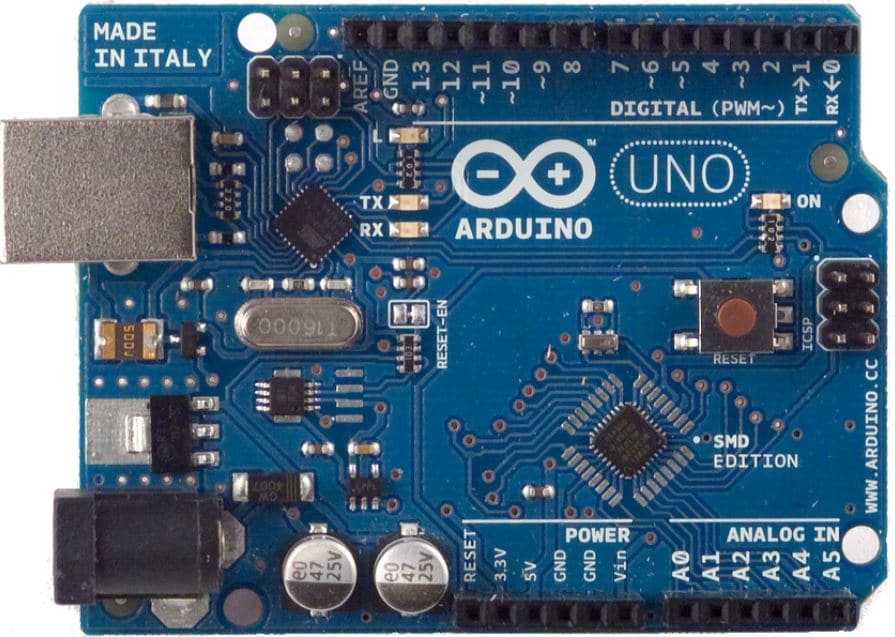
Arduino UNO R3 Microcontroller
,
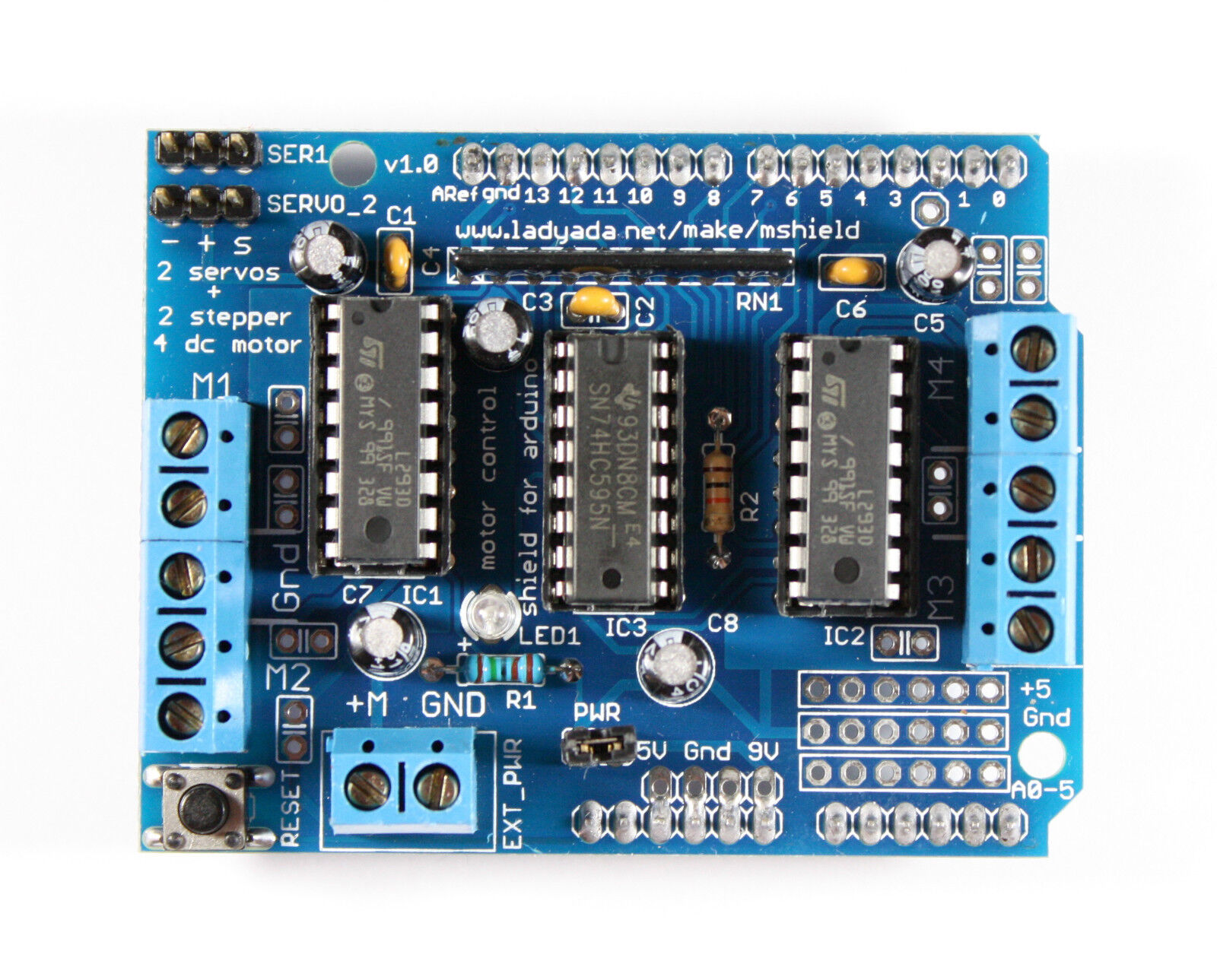
Solartracker-Code-Version 14.5, Pinbelegung am Arduino Uno
R3
und am Adafruit Motorshield V1
D9 (Servo 2,
Pin S): Servo-Steuerleitung
(Elevation)
Vin: Stromversorgung des Servos
(für Elevation), ca. 7.5 Volt
DC,
am motorshield mit 9 V beschriftet
D14
(A0):
grüne LED (Drehteller vorwärts)
D15 (A1): rote LED (Drehteller rückwärts)
A2: Hall-Drehwinkelsensor (für Azimut),
3-polig
A3:
3-Volt-Solarpanel
(+), (GND)
A4:
(SDA): LCD-Display, DS3231 RTC
(jeweils 4-polig)
A5: (SCL): LCD-Display, DS3231 RTC
(jeweils 4-polig)
M3/M4:
(Motorshield):
Anschluss Schrittmotor
(Azimut), 4-polig