Arduino MEGA 2560 Microcontroller
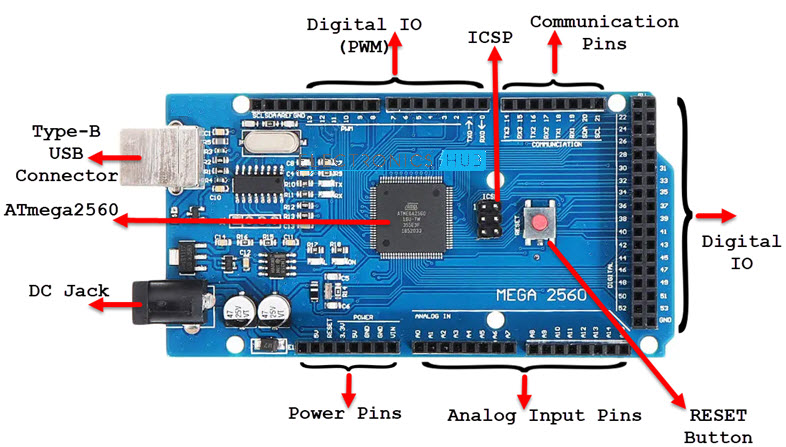
Solartracker Nextion Version 4.0, Pinbelegung am Arduino MEGA
und am Arduino-Motor-Shield Rev.3OUT5 Servo Signal-Pin 5: Servo-Steuerleitung
Vin: Stromversorgung des Servos, ca. 7.5 Volt DC
Ampel 1 (links)
A10: grüne LED (Drehteller vorwärts)
A9: gelbe LED (Drehteller schnell rückwärts in Startposition)
A8 rote LED (Drehteller rückwärts)
Ampel 2 (rechts)
A11: grüne LED (Drehteller vorwärts)
A12: gelbe LED (Drehteller schnell rückwärts in Startposition)
A13 rote LED (Drehteller rückwärts)
IN2: Hall-Drehwinkelsensor (für Azimut), 3-polig (GND, Signal, +5V)
A5 : 3-Volt-Solarpanel (Pluspol, GND)
A/B: Motorshield: Anschluss Schrittmotor, 4-polig
Kabel: B = grün+schwarz, A = blau+rot
Tx2: Anschluss Rx vom Nextion-Display
Rx2: Anschluss Tx vom Nextion-Display
TWI Anschluss DS3231 RTC Echtzeituhr (GND, +5V, SDA, SCL)
Arduino-Motor-Shield REF. 3
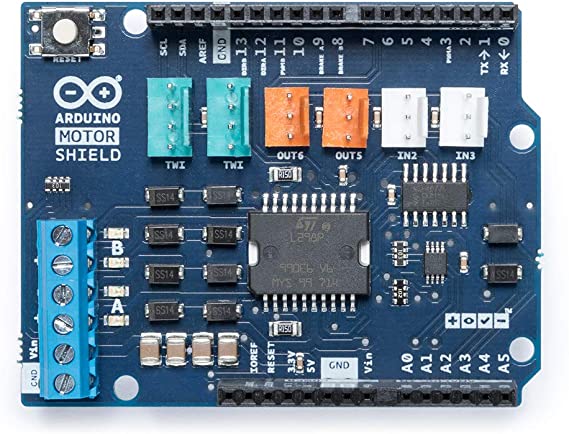
Leider kann man an dieses Motorshield
nur 1 Schrittmotor anschliessen,
im Gegensatz zum Adafruit Motorshield V1.
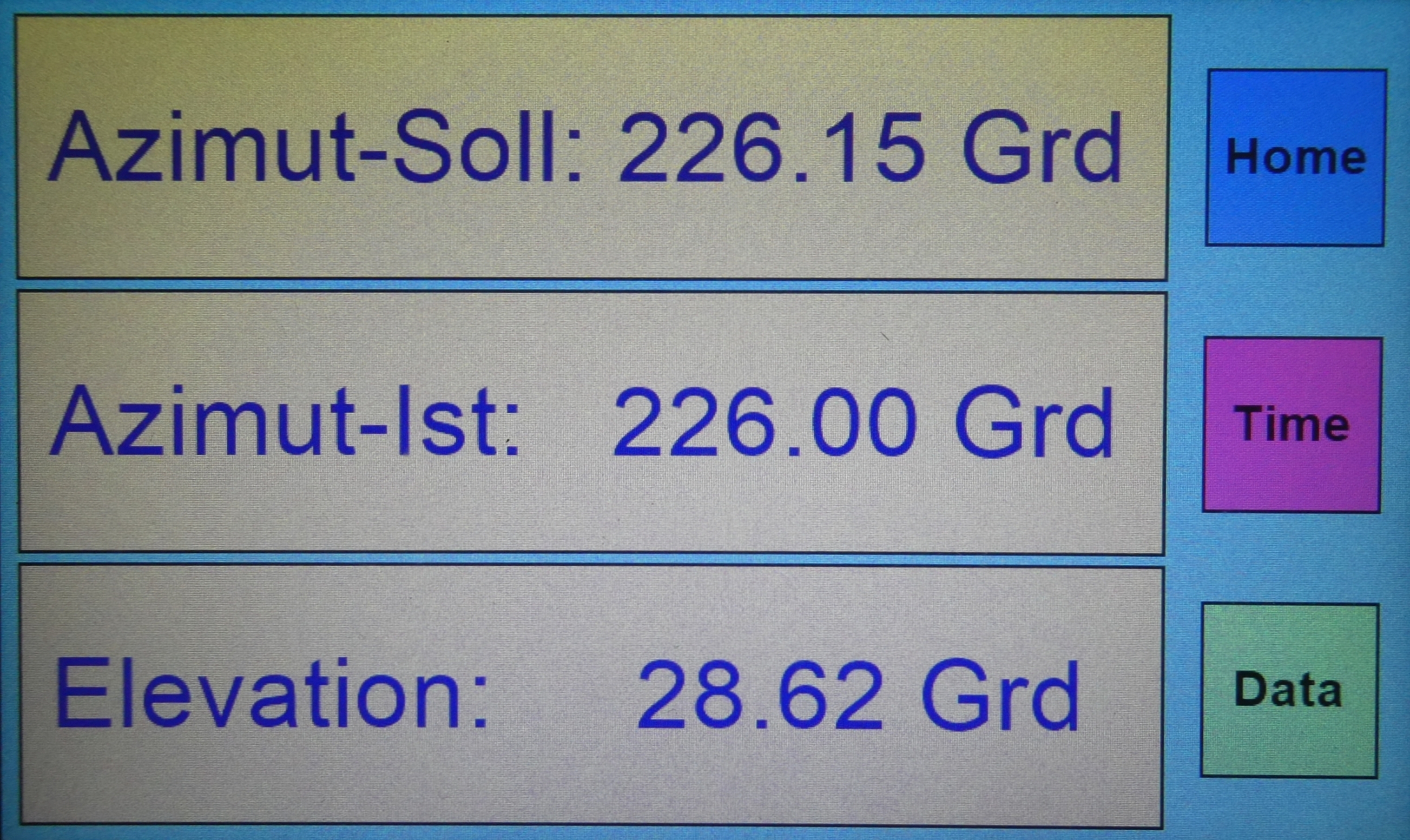
Nextion-touchscreen-Display
Ausgabe Nextion 5" touchscreen Display